RobHess的SIFT源码分析:imgfeatures.h和imgfeatures.c文件
SIFT源码分析系列文章的索引在这里:
- RobHess的SIFT源码分析:综述 http://masikkk.com/article/RobHess-SIFT-Source-Code-Analysis-Overview/
imgfeatures.h中有SIFT特征点结构struct feature的定义,除此之外还有一些特征点的导入导出以及特征点绘制函数的声明。 对应的imgfeatures.c文件中是特征点的导入导出以及特征点绘制函数的实现。 特征点的类型有两种:
- 一种是是牛津大学VGG提供的源码中的特征点格式;
- 另一种是David.Lowe提供的源码中的特征点格式。
struct feature结构可以兼容这两种特征点格式,但一般用的多的还是Lowe格式的特征点,源码中默认的特征点格式也是Lowe格式的。
特征点结构体struct feature的定义如下:
/*特征点结构体
此结构体可存储2中类型的特征点:
FEATURE_OXFD表示是牛津大学VGG提供的源码中的特征点格式,
FEATURE_LOWE表示是David.Lowe提供的源码中的特征点格式。
如果是OXFD类型的特征点,结构体中的a,b,c成员描述了特征点周围的仿射区域(椭圆的参数),即邻域。
如果是LOWE类型的特征点,结构体中的scl和ori成员描述了特征点的大小和方向。
fwd_match,bck_match,mdl_match一般同时只有一个起作用,用来指明此特征点对应的匹配点
*/
struct feature
{
double x; /**< x coord */ //特征点的x坐标
double y; /**< y coord */ //特征点的y坐标
double a; /**< Oxford-type affine region parameter */ //OXFD特征点中椭圆的参数
double b; /**< Oxford-type affine region parameter */ //OXFD特征点中椭圆的参数
double c; /**< Oxford-type affine region parameter */ //OXFD特征点中椭圆的参数
double scl; /**< scale of a Lowe-style feature *///LOWE特征点的尺度
double ori; /**< orientation of a Lowe-style feature */ //LOWE特征点的方向
int d; /**< descriptor length */ //特征描述子的长度,即维数,一般是128
double descr[FEATURE_MAX_D]; /**< descriptor */ //128维的特征描述子,即一个double数组
int type; /**< feature type, OXFD or LOWE */ //特征点类型
int category; /**< all-purpose feature category */
struct feature* fwd_match; /**< matching feature from forward image */ //指明此特征点对应的匹配点
struct feature* bck_match; /**< matching feature from backmward image */ //指明此特征点对应的匹配点
struct feature* mdl_match; /**< matching feature from model */ //指明此特征点对应的匹配点
CvPoint2D64f img_pt; /**< location in image */ //特征点的坐标,等于(x,y)
CvPoint2D64f mdl_pt; /**< location in model */ //当匹配类型是mdl_match时用到
void* feature_data; /**< user-definable data */ //用户定义的数据:
//在SIFT极值点检测中,是detection_data结构的指针
//在k-d树搜索中,是bbf_data结构的指针
//在RANSAC算法中,是ransac_data结构的指针
};
将Lowe格式的特征点导出到txt文件后,文件的格式如下图:
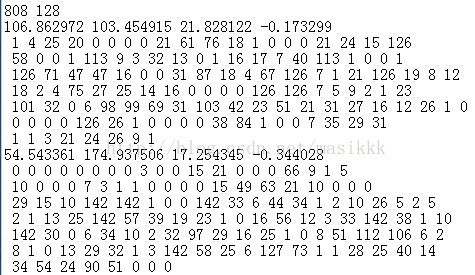
Lowe格式的SIFT特征点
第一行的两个数分别是特征点的总个数(上图只截取了2个特征描述子)和特征描述子的维数(默认是128) 然后是每个特征点的数据,每个特征点的第一行的四个数分别是:特征点的y坐标,x坐标,特征点的尺度,特征点的方向 然后是128个整数,即128维的特征描述子,共7行,前6行每行20个,最后一行8个。 默认情况下,检测出的特征点是按照尺度的降序排列的。
下面是imgfeatures.h和imgfeatures.c文件的详细注释: imgfeatures.h:
/**@file
Functions and structures for dealing with image features
Copyright (C) 2006-2010 Rob Hess <hess@eecs.oregonstate.edu>
@version 1.1.2-20100521
*/
/*
此文件中定义了存储特征点的结构体feature,以及几个函数原型的声明:
1、特征点的导入导出
2、特征点绘制
*/
#ifndef IMGFEATURES_H
#define IMGFEATURES_H
#include "cxcore.h"
/*特征点的类型:
FEATURE_OXFD表示是牛津大学VGG提供的源码中的特征点格式,
FEATURE_LOWE表示是David.Lowe提供的源码中的特征点格式
*/
/** FEATURE_OXFD <BR> FEATURE_LOWE */
enum feature_type
{
FEATURE_OXFD,
FEATURE_LOWE,
};
/*特征点匹配类型:
FEATURE_FWD_MATCH:表明feature结构中的fwd_match域是对应的匹配点
FEATURE_BCK_MATCH:表明feature结构中的bck_match域是对应的匹配点
FEATURE_MDL_MATCH:表明feature结构中的mdl_match域是对应的匹配点
*/
/** FEATURE_FWD_MATCH <BR> FEATURE_BCK_MATCH <BR> FEATURE_MDL_MATCH */
enum feature_match_type
{
FEATURE_FWD_MATCH,
FEATURE_BCK_MATCH,
FEATURE_MDL_MATCH,
};
/*画出的特征点的颜色*/
/* colors in which to display different feature types */
#define FEATURE_OXFD_COLOR CV_RGB(255,255,0)
#define FEATURE_LOWE_COLOR CV_RGB(255,0,255)
/*最大特征描述子长度,定为128*/
/** max feature descriptor length */
#define FEATURE_MAX_D 128
/*特征点结构体
此结构体可存储2中类型的特征点:
FEATURE_OXFD表示是牛津大学VGG提供的源码中的特征点格式,
FEATURE_LOWE表示是David.Lowe提供的源码中的特征点格式。
如果是OXFD类型的特征点,结构体中的a,b,c成员描述了特征点周围的仿射区域(椭圆的参数),即邻域。
如果是LOWE类型的特征点,结构体中的scl和ori成员描述了特征点的大小和方向。
fwd_match,bck_match,mdl_match一般同时只有一个起作用,用来指明此特征点对应的匹配点
*/
/**
Structure to represent an affine invariant image feature. The fields
x, y, a, b, c represent the affine region around the feature:
a(x-u)(x-u) + 2b(x-u)(y-v) + c(y-v)(y-v) = 1
*/
struct feature
{
double x; /**< x coord */ //特征点的x坐标
double y; /**< y coord */ //特征点的y坐标
double a; /**< Oxford-type affine region parameter */ //OXFD特征点中椭圆的参数
double b; /**< Oxford-type affine region parameter */ //OXFD特征点中椭圆的参数
double c; /**< Oxford-type affine region parameter */ //OXFD特征点中椭圆的参数
double scl; /**< scale of a Lowe-style feature *///LOWE特征点的尺度
double ori; /**< orientation of a Lowe-style feature */ //LOWE特征点的方向
int d; /**< descriptor length */ //特征描述子的长度,即维数,一般是128
double descr[FEATURE_MAX_D]; /**< descriptor */ //128维的特征描述子,即一个double数组
int type; /**< feature type, OXFD or LOWE */ //特征点类型
int category; /**< all-purpose feature category */
struct feature* fwd_match; /**< matching feature from forward image */ //指明此特征点对应的匹配点
struct feature* bck_match; /**< matching feature from backmward image */ //指明此特征点对应的匹配点
struct feature* mdl_match; /**< matching feature from model */ //指明此特征点对应的匹配点
CvPoint2D64f img_pt; /**< location in image */ //特征点的坐标,等于(x,y)
CvPoint2D64f mdl_pt; /**< location in model */ //当匹配类型是mdl_match时用到
void* feature_data; /**< user-definable data */ //用户定义的数据:
//在SIFT极值点检测中,是detection_data结构的指针
//在k-d树搜索中,是bbf_data结构的指针
//在RANSAC算法中,是ransac_data结构的指针
};
/*从文件中读入图像特征
文件中的特征点格式必须是FEATURE_OXFD或FEATURE_LOWE格式
参数:
filename:文件名
type:特征点类型
feat:用来存储特征点的feature数组的指针
返回值:导入的特征点个数
*/
/**
Reads image features from file. The file should be formatted as from
the code provided by the Visual Geometry Group at Oxford or from the
code provided by David Lowe.
@param filename location of a file containing image features
@param type determines how features are input. If \a type is FEATURE_OXFD,
the input file is treated as if it is from the code provided by the VGG
at Oxford: http://www.robots.ox.ac.uk:5000/~vgg/research/affine/index.html
<BR><BR>
If \a type is FEATURE_LOWE, the input file is treated as if it is from
David Lowe's SIFT code: http://www.cs.ubc.ca/~lowe/keypoints
@param feat pointer to an array in which to store imported features; memory for
this array is allocated by this function and must be freed by the caller using free(*feat)
@return Returns the number of features imported from filename or -1 on error
*/
extern int import_features( char* filename, int type, struct feature** feat );
/*导出feature数组到文件
参数:
filename:文件名
feat:特征数组
n:特征点个数
返回值:0:成功;1:失败
*/
/**
Exports a feature set to a file formatted depending on the type of
features, as specified in the feature struct's type field.
@param filename name of file to which to export features
@param feat feature array
@param n number of features
@return Returns 0 on success or 1 on error
*/
extern int export_features( char* filename, struct feature* feat, int n );
/*在图片上画出特征点
参数:
img:图像
feat:特征点数组
n:特征点个数
*/
/**
Displays a set of features on an image
@param img image on which to display features
@param feat array of Oxford-type features
@param n number of features
*/
extern void draw_features( IplImage* img, struct feature* feat, int n );
/*计算两个特征描述子间的欧氏距离的平方
参数:
f1:第一个特征点
f2:第二个特征点
返回值:欧氏距离的平方
*/
/**
Calculates the squared Euclidian distance between two feature descriptors.
@param f1 first feature
@param f2 second feature
@return Returns the squared Euclidian distance between the descriptors of
\a f1 and \a f2.
*/
extern double descr_dist_sq( struct feature* f1, struct feature* f2 );
#endif
imgfeatures.c文件:
/*
Functions and structures for dealing with image features
Copyright (C) 2006-2010 Rob Hess <hess@eecs.oregonstate.edu>
@version 1.1.2-20100521
*/
/*
此文件中有几个函数的实现:特征点的导入导出,特征点的绘制
*/
#include "utils.h"
#include "imgfeatures.h"
#include <cxcore.h>
#include <math.h>
/************************ 未暴露接口的一些本地函数的声明 **************************/
static int import_oxfd_features( char*, struct feature** );//导入OXFD格式特征点
static int export_oxfd_features( char*, struct feature*, int );//导出OXFD格式特征点
static void draw_oxfd_features( IplImage*, struct feature*, int );//画OXFD格式特征点
static void draw_oxfd_feature( IplImage*, struct feature*, CvScalar );//画单个点
static int import_lowe_features( char*, struct feature** );//导入LOWE格式特征点
static int export_lowe_features( char*, struct feature*, int );//导出LOWE格式特征点
static void draw_lowe_features( IplImage*, struct feature*, int );//画LOWE格式特征点
static void draw_lowe_feature( IplImage*, struct feature*, CvScalar );//画单个点
/*从文件中读入图像特征
文件中的特征点格式必须是FEATURE_OXFD或FEATURE_LOWE格式
参数:
filename:文件名
type:特征点类型
feat:用来存储特征点的feature数组的指针
返回值:导入的特征点个数
*/
/*
Reads image features from file. The file should be formatted as from
the code provided by the Visual Geometry Group at Oxford:
@param filename location of a file containing image features
@param type determines how features are input. If \a type is FEATURE_OXFD,
the input file is treated as if it is from the code provided by the VGG
at Oxford:http://www.robots.ox.ac.uk:5000/~vgg/research/affine/index.html
If \a type is FEATURE_LOWE, the input file is treated as if it is from
David Lowe's SIFT code:http://www.cs.ubc.ca/~lowe/keypoints
@param feat pointer to an array in which to store features
@return Returns the number of features imported from filename or -1 on error
*/
int import_features( char* filename, int type, struct feature** feat )
{
int n;
//根据特征点类型,调用不同的函数完成导入功能
switch( type )
{
case FEATURE_OXFD:
n = import_oxfd_features( filename, feat );//调用函数,导入OXFD格式特征点
break;
case FEATURE_LOWE:
n = import_lowe_features( filename, feat );//调用函数,导入LOWE格式特征点
break;
default: //特征点格式无法识别
fprintf( stderr, "Warning: import_features(): unrecognized feature" \
"type, %s, line %d\n", __FILE__, __LINE__ );
return -1;
}
//导入失败
if( n == -1 )
fprintf( stderr, "Warning: unable to import features from %s," \
" %s, line %d\n", filename, __FILE__, __LINE__ );
return n;
}
/*导出feature数组到文件
参数:
filename:文件名
feat:特征数组
n:特征点个数
返回值:0:成功;1:失败
*/
/*
Exports a feature set to a file formatted depending on the type of
features, as specified in the feature struct's type field.
@param filename name of file to which to export features
@param feat feature array
@param n number of features
@return Returns 0 on success or 1 on error
*/
int export_features( char* filename, struct feature* feat, int n )
{
int r, type;
//参数合法性检查
if( n <= 0 || ! feat )
{
fprintf( stderr, "Warning: no features to export, %s line %d\n",
__FILE__, __LINE__ );
return 1;
}
type = feat[0].type;//特征点的类型、
//根据特征点类型,调用不同的函数完成导出功能
switch( type )
{
case FEATURE_OXFD:
r = export_oxfd_features( filename, feat, n );//调用函数,导出OXFD格式特征点
break;
case FEATURE_LOWE:
r = export_lowe_features( filename, feat, n );//调用函数,导出LOWE格式特征点
break;
default:
fprintf( stderr, "Warning: export_features(): unrecognized feature" \
"type, %s, line %d\n", __FILE__, __LINE__ );
return -1;
}
if( r ) //导出函数返回值非0,表示导出失败
fprintf( stderr, "Warning: unable to export features to %s," \
" %s, line %d\n", filename, __FILE__, __LINE__ );
return r;
}
/*在图片上画出特征点
参数:
img:图像
feat:特征点数组
n:特征点个数
*/
/*
Draws a set of features on an image
@param img image on which to draw features
@param feat array of features
@param n number of features
*/
void draw_features( IplImage* img, struct feature* feat, int n )
{
int type;
//参数合法性检查
if( n <= 0 || ! feat )
{
fprintf( stderr, "Warning: no features to draw, %s line %d\n",
__FILE__, __LINE__ );
return;
}
type = feat[0].type;//特征点的类型
//根据特征点类型,调用不同的函数完成绘图功能
switch( type )
{
case FEATURE_OXFD:
draw_oxfd_features( img, feat, n );//调用函数,在图像上画OXFD格式特征点
break;
case FEATURE_LOWE:
draw_lowe_features( img, feat, n );//调用函数,在图像上画LOWE格式特征点
break;
default:
fprintf( stderr, "Warning: draw_features(): unrecognized feature" \
" type, %s, line %d\n", __FILE__, __LINE__ );
break;
}
}
/*计算两个特征描述子间的欧氏距离的平方
参数:
f1:第一个特征点
f2:第二个特征点
返回值:欧氏距离的平方
*/
/*
Calculates the squared Euclidian distance between two feature descriptors.
@param f1 first feature
@param f2 second feature
@return Returns the squared Euclidian distance between the descriptors off1 and f2.
*/
double descr_dist_sq( struct feature* f1, struct feature* f2 )
{
double diff, dsq = 0;
double* descr1, * descr2;
int i, d;
d = f1->d;//f1的特征描述子的长度
if( f2->d != d )//若f1和f2的特征描述子长度不同,返回
return DBL_MAX;
descr1 = f1->descr;//f1的特征描述子,一个double数组
descr2 = f2->descr;//f2的特征描述子,一个double数组
//计算欧氏距离的平方,即对应元素的差的平方和
for( i = 0; i < d; i++ )
{
diff = descr1[i] - descr2[i];
dsq += diff*diff;
}
return dsq;
}
/***************************** 一些未暴露接口的内部函数 *******************************/
/***************************** Local Functions *******************************/
/*从文件中读入OXFD格式的图像特征
参数:
filename:文件名
features:用来存储特征点的feature数组的指针
返回值:导入的特征点个数
*/
/*
Reads image features from file. The file should be formatted as from
the code provided by the Visual Geometry Group at Oxford:
http://www.robots.ox.ac.uk:5000/~vgg/research/affine/index.html
@param filename location of a file containing image features
@param features pointer to an array in which to store features
@return Returns the number of features imported from filename or -1 on error
*/
static int import_oxfd_features( char* filename, struct feature** features )
{
struct feature* f;//第一个特征点的指针
int i, j, n, d;
double x, y, a, b, c, dv;
FILE* file;//文件指针
if( ! features )
fatal_error( "NULL pointer error, %s, line %d", __FILE__, __LINE__ );
//打开文件
if( ! ( file = fopen( filename, "r" ) ) )
{
fprintf( stderr, "Warning: error opening %s, %s, line %d\n",
filename, __FILE__, __LINE__ );
return -1;
}
//读入特征描述子维数和特征点个数
/* read dimension and number of features */
if( fscanf( file, " %d %d ", &d, &n ) != 2 )
{
fprintf( stderr, "Warning: file read error, %s, line %d\n",
__FILE__, __LINE__ );
return -1;
}
//特征描述子维数大于定义的最大维数,出错
if( d > FEATURE_MAX_D )
{
fprintf( stderr, "Warning: descriptor too long, %s, line %d\n",
__FILE__, __LINE__ );
return -1;
}
//分配内存,n个feature结构大小,返回首地址给f
f = calloc( n, sizeof(struct feature) );
//遍历文件中的n个特征点
for( i = 0; i < n; i++ )
{
//读入仿射区域参数
/* read affine region parameters */
if( fscanf( file, " %lf %lf %lf %lf %lf ", &x, &y, &a, &b, &c ) != 5 )
{
fprintf( stderr, "Warning: error reading feature #%d, %s, line %d\n",
i+1, __FILE__, __LINE__ );
free( f );//发生错误后释放内存
return -1;
}
//给第i个特征点赋值
f[i].img_pt.x = f[i].x = x;//特征点的x坐标
f[i].img_pt.y = f[i].y = y;//特征点的y坐标
f[i].a = a;
f[i].b = b;
f[i].c = c;
f[i].d = d;
f[i].type = FEATURE_OXFD;//特征点类型
//读入特征描述子
/* read descriptor */
for( j = 0; j < d; j++ )
{
if( ! fscanf( file, " %lf ", &dv ) )
{
fprintf( stderr, "Warning: error reading feature descriptor" \
" #%d, %s, line %d\n", i+1, __FILE__, __LINE__ );
free( f );//发生错误后释放内存
return -1;
}
f[i].descr[j] = dv;//赋给第i个特征点的第j个特征描述符
}
//其他一些没什么用的参数
f[i].scl = f[i].ori = 0;//OXFD特征点无此参数
f[i].category = 0;
f[i].fwd_match = f[i].bck_match = f[i].mdl_match = NULL;
f[i].mdl_pt.x = f[i].mdl_pt.y = -1;
f[i].feature_data = NULL;
}
//关闭文件
if( fclose(file) )
{
fprintf( stderr, "Warning: file close error, %s, line %d\n",
__FILE__, __LINE__ );
free( f );//发生错误后释放内存
return -1;
}
*features = f;//将第一个特征点的指针赋给*feature
return n;//返回读入的特征点个数
}
/*导出OXFD格式的特征点集到文件
参数:
filename:文件名
feat:特征数组
n:特征点个数
返回值:0:成功;1:失败
*/
/*
Exports a feature set to a file formatted as one from the code provided
by the Visual Geometry Group at Oxford:
http://www.robots.ox.ac.uk:5000/~vgg/research/affine/index.html
@param filename name of file to which to export features
@param feat feature array
@param n number of features
@return Returns 0 on success or 1 on error
*/
static int export_oxfd_features( char* filename, struct feature* feat, int n )
{
FILE* file;
int i, j, d;
if( n <= 0 )
{
fprintf( stderr, "Warning: feature count %d, %s, line %s\n",
n, __FILE__, __LINE__ );
return 1;
}
//打开文件
if( ! ( file = fopen( filename, "w" ) ) )
{
fprintf( stderr, "Warning: error opening %s, %s, line %d\n",
filename, __FILE__, __LINE__ );
return 1;
}
d = feat[0].d;//特征描述子的维数
fprintf( file, "%d\n%d\n", d, n );//首先写入特征描述子的维数和特征点个数
//依次写入每个特征点的信息
for( i = 0; i < n; i++ )
{
//写入仿射区域参数
fprintf( file, "%f %f %f %f %f", feat[i].x, feat[i].y, feat[i].a,
feat[i].b, feat[i].c );
//写入d个特征描述子的元素
for( j = 0; j < d; j++ )
fprintf( file, " %f", feat[i].descr[j] );
fprintf( file, "\n" );//换行
}
//关闭文件
if( fclose(file) )
{
fprintf( stderr, "Warning: file close error, %s, line %d\n",
__FILE__, __LINE__ );
return 1;
}
return 0;
}
/*在图像上画出OXFD类型的特征点
参数:
img:图像指针
feat:特征数组
n:特征个数
*/
/*
Draws Oxford-type affine features
@param img image on which to draw features
@param feat array of Oxford-type features
@param n number of features
*/
static void draw_oxfd_features( IplImage* img, struct feature* feat, int n )
{
CvScalar color = CV_RGB( 255, 255, 255 );//颜色
int i;
if( img-> nChannels > 1 )
color = FEATURE_OXFD_COLOR;
//调用函数,依次画出每个特征点
for( i = 0; i < n; i++ )
draw_oxfd_feature( img, feat + i, color );
}
/*在图像上画单个OXFD特征点
参数:
img:图像指针
feat:要画的特征点
color:颜色
*/
/*
Draws a single Oxford-type feature
@param img image on which to draw
@param feat feature to be drawn
@param color color in which to draw
*/
static void draw_oxfd_feature( IplImage* img, struct feature* feat, CvScalar color )
{
double m[4] = { feat->a, feat->b, feat->b, feat->c };
double v[4] = { 0 };//特征向量的数据
double e[2] = { 0 };//特征值的数据
CvMat M, V, E;
double alpha, l1, l2;
//计算椭圆的轴线和方向
/* compute axes and orientation of ellipse surrounding affine region */
cvInitMatHeader( &M, 2, 2, CV_64FC1, m, CV_AUTOSTEP );//矩阵
cvInitMatHeader( &V, 2, 2, CV_64FC1, v, CV_AUTOSTEP );//2个2*1的特征向量组成的矩阵
cvInitMatHeader( &E, 2, 1, CV_64FC1, e, CV_AUTOSTEP );//特征值
cvEigenVV( &M, &V, &E, DBL_EPSILON, 0, 0 );//计算特征值和特征向量
l1 = 1 / sqrt( e[1] );
l2 = 1 / sqrt( e[0] );
alpha = -atan2( v[1], v[0] );
alpha *= 180 / CV_PI;
//画椭圆和十字星
cvEllipse( img, cvPoint( feat->x, feat->y ), cvSize( l2, l1 ), alpha,
0, 360, CV_RGB(0,0,0), 3, 8, 0 );
cvEllipse( img, cvPoint( feat->x, feat->y ), cvSize( l2, l1 ), alpha,
0, 360, color, 1, 8, 0 );
cvLine( img, cvPoint( feat->x+2, feat->y ), cvPoint( feat->x-2, feat->y ),
color, 1, 8, 0 );
cvLine( img, cvPoint( feat->x, feat->y+2 ), cvPoint( feat->x, feat->y-2 ),
color, 1, 8, 0 );
}
/*从文件中读入LOWE特征点
参数:
filename:文件名
features:存放特征点的特征数组的指针
返回值:读入的特征点个数
*/
/*
Reads image features from file. The file should be formatted as from
the code provided by David Lowe:http://www.cs.ubc.ca/~lowe/keypoints/
@param filename location of a file containing image features
@param features pointer to an array in which to store features
@return Returns the number of features imported from filename or -1 on error
*/
static int import_lowe_features( char* filename, struct feature** features )
{
struct feature* f;//第一个特征点的指针
int i, j, n, d;
double x, y, s, o, dv;
FILE* file;
if( ! features )
fatal_error( "NULL pointer error, %s, line %d", __FILE__, __LINE__ );
//打开文件
if( ! ( file = fopen( filename, "r" ) ) )
{
fprintf( stderr, "Warning: error opening %s, %s, line %d\n",
filename, __FILE__, __LINE__ );
return -1;
}
//首先读入特征点个数和特征描述子维数
/* read number of features and dimension */
if( fscanf( file, " %d %d ", &n, &d ) != 2 )
{
fprintf( stderr, "Warning: file read error, %s, line %d\n",
__FILE__, __LINE__ );
return -1;
}
//特征描述子维数大于定义的最大维数,出错
if( d > FEATURE_MAX_D )
{
fprintf( stderr, "Warning: descriptor too long, %s, line %d\n",
__FILE__, __LINE__ );
return -1;
}
//分配内存,n个feature结构大小,返回首地址给f
f = calloc( n, sizeof(struct feature) );
//依次读入n个特征点
for( i = 0; i < n; i++ )
{
//读入特征点的坐标(注意x,y顺序),尺度和方向
/* read affine region parameters */
if( fscanf( file, " %lf %lf %lf %lf ", &y, &x, &s, &o ) != 4 )
{
fprintf( stderr, "Warning: error reading feature #%d, %s, line %d\n",
i+1, __FILE__, __LINE__ );
free( f );//出错后释放内存
return -1;
}
//给第i个特征点赋值
f[i].img_pt.x = f[i].x = x;//特征点的x坐标
f[i].img_pt.y = f[i].y = y;//特征点的y坐标
f[i].scl = s;//特征点的大小,即其主方向的梯度的模值
f[i].ori = o;//特征点的方向,即其主方向
f[i].d = d;//特征描述子的维数
f[i].type = FEATURE_LOWE;//类型
//读入特征描述子
/* read descriptor */
for( j = 0; j < d; j++ )
{
if( ! fscanf( file, " %lf ", &dv ) )
{
fprintf( stderr, "Warning: error reading feature descriptor" \
" #%d, %s, line %d\n", i+1, __FILE__, __LINE__ );
free( f );//出错后释放内存
return -1;
}
f[i].descr[j] = dv;
}
//其他一些没什么用的参数
f[i].a = f[i].b = f[i].c = 0;
f[i].category = 0;
f[i].fwd_match = f[i].bck_match = f[i].mdl_match = NULL;
f[i].mdl_pt.x = f[i].mdl_pt.y = -1;
}
//关闭文件
if( fclose(file) )
{
fprintf( stderr, "Warning: file close error, %s, line %d\n",
__FILE__, __LINE__ );
free( f );//出错后释放内存
return -1;
}
*features = f;//首地址赋给*features
return n;//返回读入的特征点个数
}
/*导出LOWE格式特征点集合到文件
参数:
filename:文件名
feat:特征点数组
n:特征点个数
返回值:0:成功;1:失败
*/
/*
Exports a feature set to a file formatted as one from the code provided
by David Lowe:http://www.cs.ubc.ca/~lowe/keypoints/
@param filename name of file to which to export features
@param feat feature array
@param n number of features
@return Returns 0 on success or 1 on error
*/
static int export_lowe_features( char* filename, struct feature* feat, int n )
{
FILE* file;
int i, j, d;
if( n <= 0 )
{
fprintf( stderr, "Warning: feature count %d, %s, line %s\n",
n, __FILE__, __LINE__ );
return 1;
}
//打开文件
if( ! ( file = fopen( filename, "w" ) ) )
{
fprintf( stderr, "Warning: error opening %s, %s, line %d\n",
filename, __FILE__, __LINE__ );
return 1;
}
d = feat[0].d;//特征描述子维数
fprintf( file, "%d %d\n", n, d );//首先写入特征点个数和特征描述子维数
//依次写入每个特征点的信息
for( i = 0; i < n; i++ )
{
//写入特征点坐标(注意x,y顺序),尺度,方向
fprintf( file, "%f %f %f %f", feat[i].y, feat[i].x,
feat[i].scl, feat[i].ori );
//写入特征描述子
for( j = 0; j < d; j++ )
{
//每行20个元素
/* write 20 descriptor values per line */
if( j % 20 == 0 )
fprintf( file, "\n" );
fprintf( file, " %d", (int)(feat[i].descr[j]) );
}
fprintf( file, "\n" );
}
//关闭文件
if( fclose(file) )
{
fprintf( stderr, "Warning: file close error, %s, line %d\n",
__FILE__, __LINE__ );
return 1;
}
return 0;
}
/*在图像上画LOWE特征点
参数:
img:图像指针
feat:特征点数组
n:特征点个数
*/
/*
Draws Lowe-type features
@param img image on which to draw features
@param feat array of Oxford-type features
@param n number of features
*/
static void draw_lowe_features( IplImage* img, struct feature* feat, int n )
{
CvScalar color = CV_RGB( 255, 255, 255 );//颜色
int i;
if( img-> nChannels > 1 )
color = FEATURE_LOWE_COLOR;
//调用函数,依次画n个特征点
for( i = 0; i < n; i++ )
draw_lowe_feature( img, feat + i, color );
}
/*画单个LOWE特征点
参数:
img:图像指针
feat:要画的特征点
color:颜色
*/
/*
Draws a single Lowe-type feature
@param img image on which to draw
@param feat feature to be drawn
@param color color in which to draw
*/
static void draw_lowe_feature( IplImage* img, struct feature* feat, CvScalar color )
{
int len, hlen, blen, start_x, start_y, end_x, end_y, h1_x, h1_y, h2_x, h2_y;
double scl, ori;
double scale = 5.0;
double hscale = 0.75;
CvPoint start, end, h1, h2;
/* compute points for an arrow scaled and rotated by feat's scl and ori */
//箭头杆的起点的坐标
start_x = cvRound( feat->x );
start_y = cvRound( feat->y );
scl = feat->scl;//特征点的大小
ori = feat->ori;//特征点的方向,弧度
len = cvRound( scl * scale );//箭头杆的长度
hlen = cvRound( scl * hscale );//箭头分叉的长度
blen = len - hlen;
//箭头杆的终点的坐标
end_x = cvRound( len * cos( ori ) ) + start_x;
end_y = cvRound( len * -sin( ori ) ) + start_y;
//箭头的右分叉的起点的坐标
h1_x = cvRound( blen * cos( ori + CV_PI / 18.0 ) ) + start_x;
h1_y = cvRound( blen * -sin( ori + CV_PI / 18.0 ) ) + start_y;
//箭头的左分叉的起点的坐标
h2_x = cvRound( blen * cos( ori - CV_PI / 18.0 ) ) + start_x;
h2_y = cvRound( blen * -sin( ori - CV_PI / 18.0 ) ) + start_y;
start = cvPoint( start_x, start_y );//箭头杆的起点
end = cvPoint( end_x, end_y );//箭头杆的终点
h1 = cvPoint( h1_x, h1_y );//箭头的右分叉的起点
h2 = cvPoint( h2_x, h2_y );//箭头的左分叉的起点
cvLine( img, start, end, color, 1, 8, 0 );//画箭头杆
cvLine( img, end, h1, color, 1, 8, 0 );//画右分叉
cvLine( img, end, h2, color, 1, 8, 0 );//画左分叉
}